Learning Guided Convolutional Network for Depth Completion
目前在自动驾驶领域的传感器中,LIDAR是一种较为精确的传感器,可以获取三维空间的准确深度信息。但其有两个缺点,一是与相机相比分辨率太低,只能得到稀疏的深度图,二是价格十分昂贵难以量产。
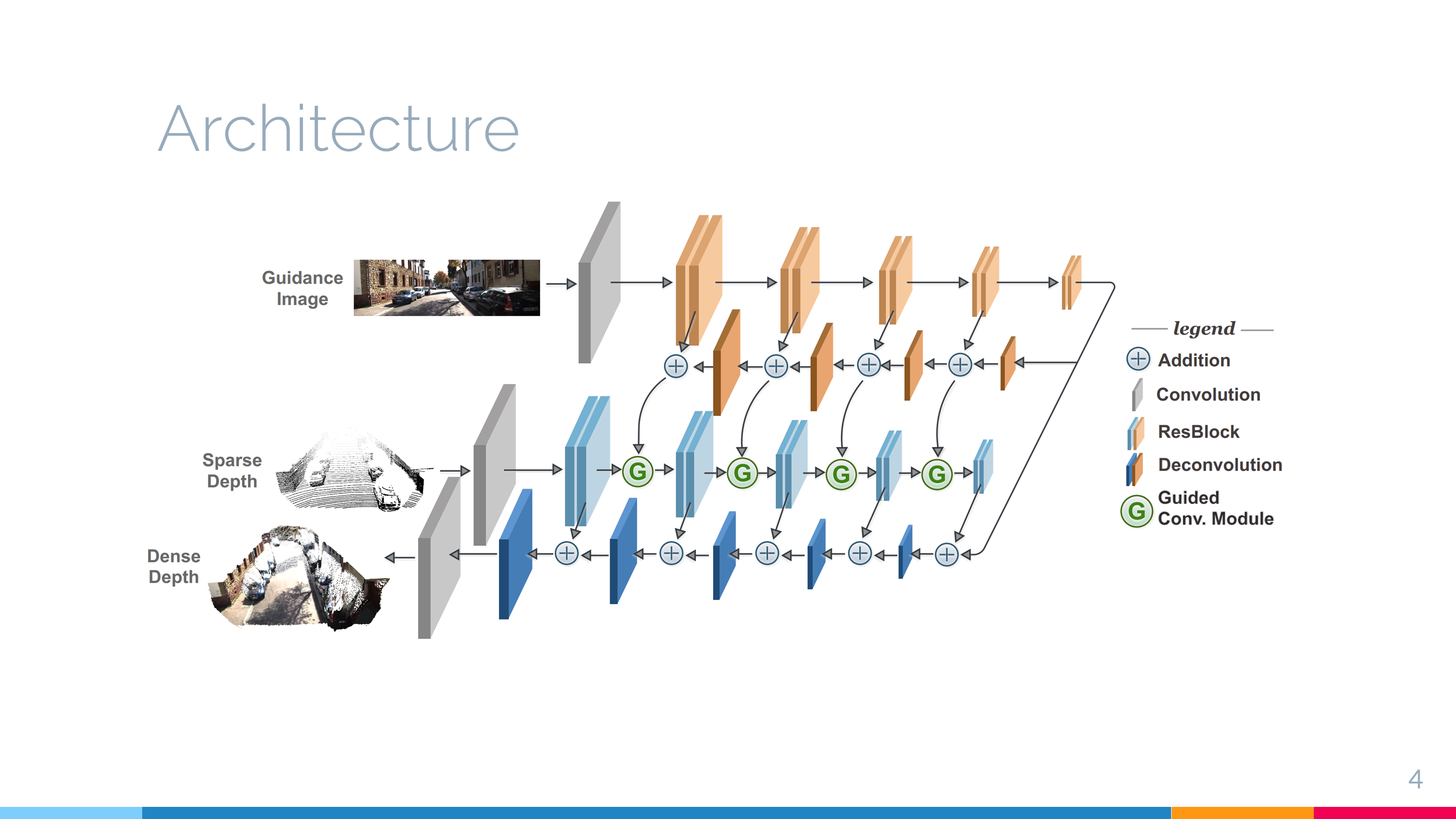
本文中的算法以RBG图像的信息作为引导,将稀疏深度图转为稠密的深度图。截止目前,在KITTI的深度补全任务上排名第一。
目前在自动驾驶领域的传感器中,LIDAR是一种较为精确的传感器,可以获取三维空间的准确深度信息。但其有两个缺点,一是与相机相比分辨率太低,只能得到稀疏的深度图,二是价格十分昂贵难以量产。
本文中的算法以RBG图像的信息作为引导,将稀疏深度图转为稠密的深度图。截止目前,在KITTI的深度补全任务上排名第一。